 Get in touch
Get in touch

1. Introduksjon: Dekonstruksjon av AC induksjonsmotor hestekrefter AC-induksjonsmotoren er en av de m...
LES MERNyheter
2025-09-23
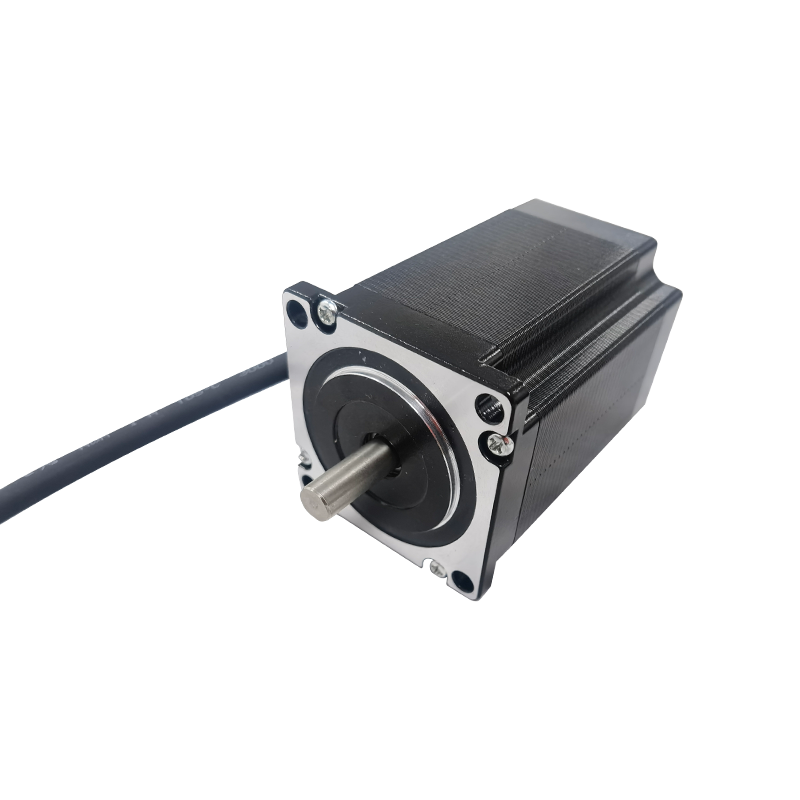
Trinnmotorer representerer en hjørnestein i moderne bevegelseskontroll, og tilbyr presis posisjonering og repeterbarhet uten behov for komplekse tilbakemeldingssystemer. Disse børsteløse, synkrone elektriske motorene konverterer digitale pulser til presise mekaniske akselrotasjoner, og beveger seg i diskrete trinn. Denne egenskapen gjør dem uunnværlige i bruksområder som spenner fra forbrukerelektronikk til sofistikert industrimaskineri. Men når applikasjoner krever ikke bare presisjon, men også betydelig kraft for å flytte tunge laster, overvinne friksjon eller opprettholde posisjon under stress, kan en stogard trinnmotor vise seg å være utilstrekkelig. Det er her kategorien av trinnmotorer med høyt dreiemoment blir kritisk.
I sammenheng med trinnmotorer refererer "høyt dreiemoment" til motorens evne til å generere en overlegen rotasjonskraft sammenlignet med standardmotorer med lignende fysisk størrelse eller ramme. Dreiemoment er det grunnleggende målet på en motors styrke, som dikterer hvor mye belastning den kan akselerere, drive og holde stille. Betydningen av høyt dreiemoment kan ikke overvurderes i krevende bruksområder. For eksempel, i robotikk er høyt dreiemoment avgjørende for leddaktuatorer som må støtte vekten av en robotarm og dens nyttelast. Ved CNC-bearbeiding sikrer det at skjæreverktøyet kan bevege seg nøyaktig gjennom materialet uten å stoppe. I hovedsak, trinnmotorer med høyt dreiemoment bygger bro mellom behovet for nøyaktig nøyaktighet og kravet til betydelig mekanisk kraft , som muliggjør innovasjon på felt som krever begge deler.
For å fullt ut forstå fordelene med trinnmotorer med høyt dreiemoment, må man først forstå de grunnleggende prinsippene som styrer alle trinnmotorer. I motsetning til standard DC-motorer som spinner kontinuerlig når spenning påføres, beveger en trinnmotor seg i faste vinkelintervaller kjent som trinn. Motorens indre struktur består av en stasjonær del (statoren) med flere elektromagnetiske spoler og en roterende del (rotoren) som vanligvis inneholder permanente magneter eller en magnetisk permeabel kjerne. Ved å aktivere statorspolene i en bestemt sekvens, skapes et magnetisk felt som tiltrekker rotoren, og får den til å justere seg med feltet og dermed rotere med en presis vinkel med hver puls som mottas fra en kontroller.
Det finnes flere grunnleggende typer trinnmotorer, hver med distinkte driftsegenskaper. Permanent Magnet (PM) trinnmotorer har en rotor med permanente magneter, som gir et godt holdemoment og en relativt stor trinnvinkel, men de tilbyr ofte lavere oppløsning og dreiemoment sammenlignet med andre typer. Variabel reluktans (VR) trinnmotorer ha en myk jernrotor som er på linje med magnetfeltbanen med minst reluktans (magnetisk motstand); disse er mindre vanlige i dag. Den mest utbredte typen, spesielt i høyytelsesapplikasjoner, er Hybrid trinnmotor . Denne designen kombinerer prinsippene til både PM- og VR-motorer, og bruker en permanentmagnetrotor med tenner som samhandler med den tannede elektromagnetiske statoren. Denne hybridkonfigurasjonen tillater svært små trinnvinkler, høyt dreiemoment og utmerket posisjonsnøyaktighet, noe som gjør den til det dominerende designet for trinnmotor med høyt dreiemoment applikasjoner.
Flere nøkkelbegreper er avgjørende for å forstå spesifikasjoner for trinnmotor. Den trinnvinkel definerer vinkelavstanden akselen roterer med hver enkelt puls, vanligvis 1,8° (200 trinn/omdreining) eller 0,9° (400 trinn/omdreining) for hybridmotorer. Holdemoment er det maksimale dreiemomentet motoren kan utøve når den står stille med viklingene tilkoblet, som er en kritisk vurdering for en trinnmotor med høyt dreiemoment da det indikerer dens evne til å holde en posisjon mot en ekstern kraft. Omvendt, sperremoment er dreiemomentet tilstede når motorviklingene ikke er energisert, forårsaket av den magnetiske interaksjonen mellom permanentmagnetrotoren og statoren; dette gir en liten passiv holdekraft.
I mekaniske termer er dreiemoment et mål på rotasjonskraften som påføres en gjenstand. For en trinnmotor er det rotasjonskraften motorakselen kan generere for å forårsake eller motstå bevegelse. Det er analogt med kraftbegrepet i et lineært system. Høyt dreiemoment betyr derfor en motors kapasitet til å produsere en sterk rotasjonskraft. Dette er viktig for applikasjoner som involverer akselerasjon av tung last, drivmekanismer med høy friksjon, eller opprettholdelse av presis posisjonering under konstant eksternt trykk. Det er viktig å skille at a trinnmotor med høyt dreiemoment er ikke nødvendigvis en annen kategori av motorer, men snarere en betegnelse for trinnmotorer konstruert for å levere dreiemomentverdier betydelig over standard grunnlinje for rammestørrelsen.
Dreiemoment i trinnmotorer måles vanligvis i Newton-meter (N·m) eller unse-tommer (oz-in). Den viktigste dreiemomentspesifikasjonen som finnes på en motors datablad er holde dreiemoment . Dette er det maksimale dreiemomentet motoren kan produsere ved stillestående når spolene er fullt energisert. Den fungerer som en primær indikator på motorens styrke. En annen avgjørende representasjon er dreiemomentkurve , en graf som plotter motorens tilgjengelige dreiemoment mot rotasjonshastigheten. Denne kurven er viktig fordi en trinnmotors dreiemoment reduseres når hastigheten øker på grunn av effekten av induktans og tilbake-EMK. Å forstå trinnmotorhastighet vs dreiemoment forholdet er avgjørende for å velge en motor som vil yte tilstrekkelig over hele det nødvendige driftsområdet til en applikasjon, for å sikre at den ikke stopper ved høyere hastigheter.
Dreiemomentutgangen til en trinnmotor er ikke en fast verdi; den påvirkes av flere drifts- og designfaktorer. Strømmen som tilføres motorviklingene er en primær driver; høyere strøm resulterer generelt i et sterkere magnetfelt og dermed høyere dreiemoment, opp til motorens designgrenser. Forsyningsspenningen spiller også en kritisk rolle, spesielt ved høyere hastigheter. En høyere spenning gjør at strømmen endrer retning i motorviklingene raskere, og bidrar til å opprettholde dreiemomentet ved økte rotasjonshastigheter. Motorens fysiske design, inkludert kvaliteten på dens magnetiske materialer, antall statortenner og luftgapet mellom rotoren og statoren, er alle konstruert for å maksimere dreiemomentgenerering. For eksempel, en NEMA 23 trinnmotor med høyt dreiemoment vil bli designet med disse faktorene optimalisert for å levere mer dreiemoment enn en standard NEMA 23-motor.
Den primære fordelen med å bruke en trinnmotor med høyt dreiemoment er den betydelige økningen i mekanisk kraft tilgjengelig for bevegelseskontrolloppgaver. Denne forbedrede evnen oversetter til flere nøkkelfordeler som er avgjørende for suksessen til krevende applikasjoner. Den mest åpenbare fordelen er evnen til å håndtere større treghetsbelastninger og overvinne betydelig friksjon. I systemer som CNC-rutere eller automatiserte transportbånd, må motoren ikke bare bevege verktøyhodet eller beltet, men også raskt akselerere og bremse massen. En motor med utilstrekkelig dreiemoment vil stoppe eller miste trinn under slike krav, mens en trinnmotor med høyt dreiemoment gir den nødvendige kraften for å sikre pålitelig drift, og dermed utvide spekteret av mulige bruksområder og forbedre robustheten til eksisterende.
Forbedret nøyaktighet og en betydelig reduksjon i posisjonsfeil er en annen stor fordel. Den høye holde dreiemoment karakteristisk for disse motorene gjør at de kan opprettholde stiv posisjon mot uventede ytre krefter eller vibrasjoner. Dette er avgjørende i applikasjoner som presisjonsmontering eller posisjonering av medisinsk utstyr, der selv et lite avvik kan føre til feil. Videre bidrar den betydelige momentreserven til å forhindre stopp, som er en vanlig årsak til tapte trinn. Tapte trinn oppstår når motoren ikke klarer å utføre en kommandert bevegelse, noe som fører til en akkumulerende posisjonsfeil som systemet med åpen sløyfe ikke kan oppdage. Ved å operere godt innenfor sin dreiemomentkapasitet, a trinnmotor med høyt dreiemoment minimerer denne risikoen betraktelig, og sikrer at den faktiske posisjonen til maskinen alltid samsvarer med den tiltenkte posisjonen som kontrolleres.
Til slutt tilbyr disse motorene større designfleksibilitet og lang levetid. Ingeniører er ikke tvunget til å presse en motor til sine operasjonelle grenser, noe som ofte fører til overoppheting og redusert levetid. I stedet kan de velge en trinnmotor med høyt dreiemoment som fungerer effektivt og kjølig innenfor ytelsesrammene. Denne takhøyden lar også systemene håndtere variable belastninger eller uventede hindringer mer elegant uten katastrofale feil. Muligheten til å bruke en mer kompakt motorramme, for eksempel en NEMA 23 trinnmotor med høyt dreiemoment , for å oppnå ytelsen som ellers kunne kreve en større, mer tungvint ramme, er en direkte fordel med denne teknologien, som muliggjør mer strømlinjeformede og effektive mekaniske design.
Den unike kombinasjonen av presisjon, pålitelighet og kraft gjør trinnmotor med høyt dreiemoments egnet for et bredt spekter av bruksområder på tvers av en rekke bransjer. Deres evne til å gi kontrollert bevegelse i diskrete trinn uten tilbakemeldingssensorer forenkler systemdesign samtidig som de sikrer nøyaktighet.
Innenfor Robotikk , disse motorene er aktuatorene for valg for leddbevegelse, spesielt i robotarmer som må håndtere tung nyttelast. Den trinnmotor med høyt dreiemoment for robotics gir den nødvendige kraften til å artikulere lemmer og gripere nøyaktig mens den støtter vekten av selve armen og gjenstanden den bærer. Dette er avgjørende for oppgaver som spenner fra industriell montering og sveising til kompleks laboratorieautomatisering. Den holde dreiemoment sikrer at armen kan opprettholde sin posisjon uten å drive, selv når den er på, men ikke i bevegelse.
CNC-maskiner representerer en klassisk applikasjon der presisjon og kraft ikke kan forhandles. A trinnmotor for CNC-freser applikasjoner må flytte skjæreverktøyet gjennom materialer som metall, tre eller plast, og møte betydelig motstand. Den trinnmotor med høyt dreiemoment sikrer at verktøybanen følges nøyaktig uten å stanse, noe som vil ødelegge arbeidsstykket og potensielt skade maskinen. De samme prinsippene gjelder for annet CNC-utstyr som dreiebenker, plasmaskjærere og laserskjærere, der konsekvent ytelse er avgjørende for kvalitet og produktivitet.
Verden av 3D-utskrift er sterkt avhengig av trinnmotorer for både aksebevegelse og filamentekstrudering. Etter hvert som skrivere øker i størrelse og hastighet, og ettersom materialer som ABS og nylon krever mer kraft for å presse gjennom ekstruderen, øker etterspørselen etter dreiemoment. A trinnmotor for 3D-skrivere høyt dreiemoment sikrer presis lagjustering ved å forhindre tapte trinn på X-, Y- og Z-aksene, mens en ekstrudermotor med høyt dreiemoment gir jevn filamentflyt, noe som fører til høyere utskriftskvalitet og pålitelighet.
Industriell automasjon er et bredt domene hvor disse motorene er allestedsnærværende. De kjører inn transportbåndsystemer pakkemaskineri , aktiver ventiler og plasser komponenter i plukke og plassere maskiner . I disse miljøene er holdbarhet og kontinuerlig drift avgjørende. Bruken av en industriell trinnmotor med høyt dreiemoment sikrer langsiktig pålitelighet og evne til å utføre repeterende oppgaver med høy nøyaktighet millioner av ganger. For tøffe miljøer, alternativer som en IP65 trinnmotor med høyt dreiemoment eller til og med en IP67-klassifisert utendørs trinnmotor er tilgjengelige for å motstå inntrengning av støv og fuktighet.
Medisinsk utstyr krever det høyeste nivået av presisjon, renslighet og pålitelighet. Steppermotorer med høyt dreiemoment brukes i enheter som automatiserte analysatorer, infusjonspumper, kirurgiske roboter og bildebehandlingsutstyr. Deres nøyaktige bevegelse kontrollerer prøvehåndtering, doseringslevering og plassering av sensorer og verktøy. I mange tilfeller, a støysvak trinnmotor for laboratorieautomatisering eller medisinsk bruk er spesifisert for å sikre et stille driftsmiljø. Den forutsigbare naturen til trinnmotordrift, kombinert med høyt dreiemoment, gjør dem ideelle for disse sensitive bruksområdene.
Utover disse dukker det stadig opp spesialiserte applikasjoner. De brukes i aktuatorer for biler for speiljustering og gasskontroll, i trykkemaskiner for nøyaktig papirmating, og i fornybare energisystemer som f.eks solar tracker stepper motor høyt dreiemoment enheter som justerer paneler for å følge solen og inn vindmøllepitch kontroll mekanismer.
Velge passende trinnmotor med høyt dreiemoment for en spesifikk applikasjon krever en systematisk evaluering av flere nøkkelparametere. Et feil valg kan føre til dårlig ytelse, motorstopp, overoppheting eller for tidlig feil.
Det mest kritiske trinnet er nøyaktig å bestemme applikasjonens dreiemomentkrav. Dette innebærer å beregne dreiemomentet som trengs for å akselerere lastens treghet og for å overvinne eventuelle kontinuerlige krefter, som friksjon eller tyngdekraft. Motoren må gi dreiemoment som overstiger det maksimale dreiemomentet som kreves av applikasjonen gjennom hele driftshastighetsområdet, som definert av trinnmotorhastighet vs dreiemoment kurve. Det er en beste praksis å inkludere en sikkerhetsmargin på 30-50 % over det beregnede kravet for å ta hensyn til uforutsette variabler som friksjonsendringer eller produksjonstoleranser. Rådgivning a trinnmotor dreiemomentdiagram for en kandidatmotor er det viktig å verifisere at momentkurven oppfyller applikasjonens krav ved både lave og høye hastigheter.
Den fysiske størrelsen på motoren, ofte standardisert av NEMA rammestørrelser (f.eks. NEMA 17, NEMA 23, NEMA 34), gir en generell indikasjon på kraftkapasiteten. A NEMA 23 trinnmotor med høyt dreiemoment vil typisk levere mer dreiemoment enn en NEMA 17-motor, mens en storramme trinnmotor som en NEMA 34 vil være i stand til enda høyere dreiemoment. Rammestørrelse alene er imidlertid ikke en perfekt indikator; den interne designen og kvaliteten på materialene påvirker i stor grad det faktiske dreiemomentet. Valget må balansere momentkravet med tilgjengelig plass og monteringsbegrensninger i maskinen.
Å matche motorens elektriske spesifikasjoner til driveren og strømforsyningen er avgjørende for å oppnå den nominelle ytelsen. Motorens gjeldende vurdering er den maksimale strømmen per fase den kan håndtere uten overoppheting. Driveren må være i stand til å levere denne strømmen. Tilførselen spenning er like viktig. En høyere spenning gjør at strømmen kan øke raskt i motorviklingene, noe som er nødvendig for å opprettholde dreiemomentet ved høyere hastigheter. Å drive en motor med en strømforsyning som har for lav spenning vil resultere i et raskt fall av dreiemoment når hastigheten øker, et fenomen som er godt synlig på motorens dreiemomentkurve.
Den trinnvinkel bestemmer motorens egenoppløsning. En standard 1,8° motor gir 200 trinn per omdreining, mens en 0,9° motor gir 400 trinn. For applikasjoner som krever svært fin posisjonskontroll, en mindre trinnvinkel eller bruk av en driver som er i stand til mikrostepping er fordelaktig. Det er viktig å huske at mens mikrostepping øker oppløsningen, øker det ikke nøyaktigheten nevneverdig; dreiemomentet som produseres ved en mikrotrinnposisjon er lavere enn ved en fulltrinnsposisjon.
Den operating environment must be considered to ensure reliability. Factors such as ambient temperature, presence of contaminants like dust or moisture, and exposure to vibrations can impact motor selection. For example, in a wash-down environment or an outdoor application, an IP65 trinnmotor med høyt dreiemoment eller høyere vil være nødvendig for å forhindre skade. Høye omgivelsestemperaturer kan kreve reduksjon av motoren (ved å bruke den under spesifikasjonen for maksimalt dreiemoment) for å forhindre overoppheting, eller velge en motor med en høyere temperaturklasse.
Velge en spesifikk modell fra det store utvalget av tilgjengelige trinnmotor med høyt dreiemoments kan være skremmende. Den følgende oversikten presenterer en rekke produkter kategorisert etter deres typiske applikasjonsstyrker, og fremhever nøkkelfunksjoner uten å referere til spesifikke merkenavn. Denne listen illustrerer mangfoldet som er tilgjengelig for ingeniører og designere.
NEMA 17 trinnmotor med høyt dreiemoment: Denne kompakte motoren er en arbeidshest i applikasjoner der plassen er begrenset, men ytelsen ikke kan kompromisses. Det er usedvanlig populært i high-end 3D-utskrift og småskala automatisering. Moderne versjoner tilbyr dreiemomentverdier som konkurrerer med større, eldre modeller, noe som gjør dem ideelle for presisjonsinstrumenter og kompakte robotikk ledd.
NEMA 23 trinnmotor med høyt dreiemoment: Uten tvil den vanligste rammestørrelsen for krevende benketoppapplikasjoner, den NEMA 23 trinnmotor med høyt dreiemoment gir en utmerket balanse mellom størrelse, kraft og kostnad. Det er det beste valget for CNC rutere , små fresemaskiner og større 3D-skrivere . Dens allsidighet gjør den egnet for et bredt spekter av industriell automasjon oppgaver.
NEMA 34 trinnmotor med høyt dreiemoment: Når det kreves betydelig kraft, dette storramme trinnmotor er neste steg opp. Den er designet for tunge belastninger CNC maskiner, industriportaler og automasjonssystemer som må flytte betydelige laster. Disse motorene er essensielle for bruksområder der høy skyvekraft er nødvendig, for eksempel i stort format trykkemaskiner .
Giret trinnmotor: Denne typen integrerer en planetgirkasse med en standard hybrid trinnmotor . Girreduksjonen multipliserer utgangsmomentet betraktelig samtidig som den reduserer utgangshastigheten, noe som skaper en eksepsjonell lav RPM motor med høyt dreiemoment . Dette er ideelt for bruksområder som transportbåndsdrift, ventilaktuatorer og ethvert system som krever høy kraft ved lave, kontrollerte hastigheter.
Vanntett trinnmotor (IP65/IP67): Designet for tøffe miljøer, en IP65 trinnmotor med høyt dreiemoment er støvtett og beskyttet mot vannstråler, noe som gjør den egnet for mat- og drikkebehandling, pakkemaskineri , og utendørs applikasjoner. An IP67-klassifisert utendørs trinnmotor tilbyr enda større beskyttelse mot midlertidig nedsenking, perfekt for solar tracker systemer eller landbruksutstyr.
Trinnmotor med lukket sløyfe med høyt dreiemoment: Dette avanserte systemet kombinerer en trinnmotor med høyt dreiemoment med integrert koder. Koderen gir tilbakemelding i sanntid til en spesialisert sjåfør, og skaper en lukket sløyfe system som kan oppdage og korrigere for tapte trinn. Denne teknologien tilbyr enkelheten til en trinnmotor med påliteligheten og høyhastighetsytelsen til en servo, ideell for oppdragskritiske medisinsk utstyr og høy gjennomstrømning plukke og plassere maskiner .
Trinnmotor med høyt dreiemoment med integrert koder og girhode: Dette representerer en svært konstruert løsning som pakker en motor, et girhode for dreiemomentmultiplikasjon og en koder for posisjonstilbakemelding i en enkelt enhet. Dette motor med integrert giver og girhode forenkler design og installasjon for komplekse bevegelsesoppgaver, og gir høyt dreiemoment, lav hastighet og kontrollsikkerhet i en kompakt pakke for applikasjoner som robotarmer and aktuatorer for biler .
Ultra-presisjon trinnmotor: Dense motors are engineered for applications requiring the utmost accuracy and smoothness, such as in medisinsk utstyr produksjon eller laboratorieautomatisering. De har ofte veldig fine trinnvinkler og er optimert for minimal vibrasjon og støy, og kvalifiserer som en støysvak trinnmotor for laboratorieautomatisering .
Sertifisert trinnmotor for regulert industri: Motorer som brukes i medisinsk utstyr, romfart eller offentlig rettet utstyr krever ofte formelle sertifiseringer. A trinnmotor med CE / UL / RoHS-sertifiseringer viser samsvar med internasjonale standarder for sikkerhet, miljø og elektromagnetisk kompatibilitet, noe som er en forutsetning for mange medisinsk utstyr og forbrukerrettede applikasjoner.
Tilpasset hybridtrinnmotor med høyt dreiemoment: For applikasjoner med unike mekaniske, elektriske eller miljømessige begrensninger, a tilpasset hybrid trinnmotor med høyt dreiemoment kan være den eneste løsningen. Leverandører kan modifisere standard design med spesielle akselstørrelser , koblinger, viklinger, belegg eller magnetiske materialer for å oppfylle nøyaktige krav til ytelse og formfaktor.
Oppnå den vurderte ytelsen fra en trinnmotor med høyt dreiemoment er helt avhengig av å pare den med riktig drivelektronikk. Selve motoren er en passiv enhet; driveren og strømforsyningen bestemmer hvor effektivt den konverterer elektrisk energi til mekanisk bevegelse.
Trinnmotor drivere er den kritiske koblingen mellom et styresignal og motoren. De tar skritt- og retningspulser med lav effekt fra en bevegelseskontroller og oversetter dem til høyeffektstrømmen som trengs for å drive motorviklingene. For trinnmotor med høyt dreiemoments , valget av driverteknologi er det viktigste. Grunnleggende drivere fungerer i fullt- eller halvtrinnsmodus, noe som kan være tilstrekkelig for noen applikasjoner, men ofte fører til merkbare vibrasjoner. Microstepping-drivere anbefales på det sterkeste. De deler elektronisk hvert hele trinn i mindre mikrotrinn, noe som resulterer i betydelig jevnere bevegelse, redusert hørbar støy og forbedret stabilitet ved lav hastighet. En sjåførs evne til å levere en jevn strøm er avgjørende for å opprettholde dreiemomentet, spesielt ved høyere hastigheter.
Strømforsyninger må velges med omhu. Strømforsyningsspenningen bør være betydelig høyere enn motorens nominelle spenning for å overvinne tilbake-EMF generert ved hastighet. En vanlig tommelfingerregel er å bruke en forsyningsspenning 5 til 20 ganger motorens merkespenning, så lenge førerens maksimale spenningsklassifisering ikke overskrides. Strømforsyningen må også være i stand til å levere strømmen som kreves av motoren. Strømstyrken (i ampere) til forsyningen bør være minst lik summen av strømmen som kreves av alle motorer som drives, selv om en margin er tilrådelig for toppbehov.
Kontrollsignaler er de digitale kommandoene som dikterer bevegelse. De aller fleste moderne stepper-drivere bruker et enkelt to-signals grensesnitt: STEP og DIRECTION. Hver puls på STEP-linjen kommanderer motoren til å bevege seg ett trinn (et trinn eller mikrotrinn). Frekvensen til disse pulsene bestemmer motorens hastighet. Nivået (høyt eller lavt) på DIRECTION-linjen bestemmer rotasjonsretningen. Denne enkelheten gjør å kontrollere en trinnmotor med høyt dreiemoment enkel for mikrokontrollere og PLS-er.
Kabling og tilkoblinger må utføres riktig for å sikre pålitelighet og forhindre skade. Det er viktig å bruke ledninger med tilstrekkelig måler for å håndtere motorens strøm uten for stort spenningsfall eller oppvarming. Tilkoblinger til driveren skal være sikre, og det er god praksis å bruke skjermede kabler for STEP- og DIRECTION-signalene for å beskytte dem mot elektrisk støy, som kan forårsake ujevn motoradferd. Riktig jording av driveren, strømforsyningen og motorrammen er også avgjørende for stabil drift.
Selv med en riktig valgt trinnmotor med høyt dreiemoment og drivsystem, kan det oppstå problemer under drift. Å forstå de grunnleggende årsakene til vanlige problemer er avgjørende for å opprettholde systemets pålitelighet og ytelse.
Motorstopp er en av de vanligste problemene. Det oppstår når dreiemomentet som kreves av lasten overstiger dreiemomentet motoren kan produsere ved en gitt hastighet. Den primære årsaken er et feil samsvar mellom motorens kapasitet og applikasjonens krav, ofte avslørt av trinnmotorhastighet vs dreiemoment kurve. Steng kan også være forårsaket av utilstrekkelig strømforsyning. En underdimensjonert strømforsyning som ikke kan gi tilstrekkelig spenning vil forårsake et raskt dreiemomentfall når hastigheten øker. På samme måte vil en driver satt til en strømgrense under motorens klassifisering hindre motoren i å generere sitt fulle dreiemoment. Løsningene inkluderer å beregne dreiemomentkrav på nytt med en større sikkerhetsmargin, velge en motor med høyere dreiemomentkurve, øke forsyningsspenningen innenfor førerens grenser, eller riktig konfigurere driverens strømutgang.
Overoppheting er en naturlig egenskap ved trinnmotorer, da de trekker strøm selv når de står stille. Imidlertid kan overdreven varme forringe isolasjonen og forkorte trinnmotorens livssyklus . Den vanligste årsaken er drift av motoren ved eller nær maksimal strømstyrke i lengre perioder. Bruk av overdreven strøm for å oppnå mer dreiemoment enn motoren er designet for vil generere varme. Andre årsaker inkluderer høy trinnhastighet ved lave hastigheter der dreiemomentproduksjonen er høy, eller utilstrekkelig kjøling i applikasjonsmiljøet. For å redusere overoppheting, sørg for at driverens strøm er riktig stilt inn - ofte til motorens merkestrøm - og ikke unødvendig høy. Å forbedre luftstrømmen rundt motoren eller legge til en kjøleribbe kan være effektivt. For kontinuerlig bruk som krever høyt dreiemoment, vil valg av en motor med høyere dreiemoment enn strengt nødvendig la den gå kjøligere.
Vibrasjon og støy er iboende til den diskrete trinnnaturen til trinnmotorer, men de kan bli problematiske i presisjonsapplikasjoner. Disse problemene er mest uttalt ved lave hastigheter og ved motorens resonansfrekvenser. Vibrasjoner kan føre til for tidlig mekanisk slitasje og redusere posisjoneringsnøyaktigheten i sensitive systemer. Den primære løsningen er bruken av mikrostepping drivere, som jevner ut bevegelsen mellom hele trinn, og reduserer vibrasjoner og hørbar støy betraktelig. Mekanisk kan det å dempe vibrasjoner ved å sikre at motoren er sikkert montert og riktig koblet til lasten. Hvis resonans ved spesifikke hastigheter er et problem, kan kontrollsystemet programmeres til å akselerere gjennom disse hastighetene raskt i stedet for å operere jevnt innenfor dem.
Unøyaktig posisjonering i et steppersystem med åpen sløyfe indikerer nesten alltid tapte trinn. Dette skjer når motoren ikke klarer å bevege seg til en kommandert posisjon fordi lastmomentet oversteg det tilgjengelige motormomentet. Systemet er uvitende om feilen, noe som fører til en akkumulerende posisjonsdrift. Grunnårsaken er ofte utilstrekkelig dreiemoment, som ligner på stopp. Det kan imidlertid også være forårsaket av plutselige sjokkbelastninger eller for høye akselerasjonshastigheter som krever øyeblikkelig dreiemoment utover motorens kapasitet. For å forhindre unøyaktighet må det første motorvalget verifiseres mot dreiemomentkurven. For applikasjoner der tapte trinn er uakseptable, er den mest robuste løsningen å gå over til en lukket sløyfe trinnmotor med høyt dreiemoment systemet. Dette systemet bruker en koder for å overvåke posisjon og vil automatisk korrigere for eventuelle tapte trinn, og sikrer nøyaktigheten til en stepper med påliteligheten til en servo.
Den field of trinnmotor med høyt dreiemoments er ikke statisk; den utvikler seg for å møte kravene til stadig mer sofistikert automatisering og presisjonsteknikk. Flere nøkkeltrender former deres fremtidige utvikling.
Fremskritt innen motoriske materialer og design fører til kontinuerlige forbedringer i effekttetthet. Bruken av permanente magneter av høyere kvalitet, som neodym, og forbedret lamineringsstål for stator- og rotorkjerner, gjør at produsenter kan trekke ut mer dreiemoment fra en gitt rammestørrelse. Denne trenden mot miniatyrisering uten å ofre ytelsen muliggjør utformingen av mer kompakt og kraftig maskineri. Forskning på nye magnetiske materialer og optimaliserte elektromagnetiske geometrier lover ytterligere gevinster i effektivitet og dreiemoment.
Integrasjon med avanserte kontrollsystemer er en dominerende trend, i stor grad drevet av den økende bruken av lukket sløyfe teknologi. Skillet mellom stepper- og servosystemer blir uskarpt trinnmotor med koder løsninger blir mer kostnadseffektive og utbredte. Fremtidige drivere vil ha mer sofistikerte algoritmer som ikke bare korrigerer for posisjonsfeil, men også aktivt demper vibrasjoner og optimaliserer strømforbruket i sanntid basert på belastningen. Denne intelligente kontrollen maksimerer motormoment tilgjengelig samtidig som den forbedrer jevnhet og effektivitet.
Den økende etterspørsel etter energieffektive motorer med høyt dreiemoment påvirker designprioriteringer. Ettersom bærekraft blir et kjerneteknisk anliggende, er det et press for å redusere det iboende energiforbruket til trinnmotorer, som vanligvis trekker full strøm selv ved stillstand. Nye driverteknologier dukker opp som dynamisk kan redusere motorstrømmen når den er full holde dreiemoment er ikke nødvendig, noe som reduserer strømforbruket og varmeutviklingen betydelig uten at det går på bekostning av ytelsen. Dette er spesielt viktig for batteridrevne applikasjoner og store industrielle installasjoner hvor energikostnadene er betydelige.
Steppermotorer med høyt dreiemoment er en kritisk muliggjørende teknologi for et stort spekter av moderne applikasjoner som krever en kombinasjon av presis posisjonskontroll og betydelig mekanisk kraft. Fra leddleddene til robotarmer til de kraftige driftene til CNC rutere og de pålitelige aktuatorene i medisinsk utstyr , gir disse motorene en unik løsning som balanserer ytelse, enkelhet og kostnadseffektivitet.
Den effective selection and use of a trinnmotor med høyt dreiemoment heng på en grundig forståelse av applikasjonens krav, spesielt dreiemomentet som trengs over hele driftshastighetsområdet. Nøye vurdering av faktorer som motorstørrelse, elektriske spesifikasjoner og miljøforhold er avgjørende. Dessuten er det umulig å oppnå optimal ytelse uten å pare motoren med en korrekt tilpasset driver og strømforsyning.
1. Introduksjon: Dekonstruksjon av AC induksjonsmotor hestekrefter AC-induksjonsmotoren er en av de m...
LES MER1. Introduksjon I moderne industriell automasjon, datasenterkonstruksjon, oppgradering av forbrukerelektronikk...
LES MERTrinnmotorer representerer en hjørnestein i moderne bevegelseskontroll, og tilbyr presis posisjonering og re...
LES MERDet industrielle motorlandskapet gjennomgår en betydelig transformasjon, drevet av den nådeløse ...
LES MERRelaterte produkter
Bygning 10, nr. 199, Jinfeng Road, Suzhou High-tech, Jiangsu-provinsen, Kina
+86-130 1379 7383
+86-512 6876 9967
sean@retekmotion.com
rsgrivic@126.com
 WhatsApp
WhatsApp
Opphavsrett © Suzhou Retek Electric Technology Co., Ltd. Alle rettigheter reservert. Custom OEM Industrial Multi Rotor Drone Motors Manufacturers













